현대차 합작사 '모셔널' 구조조정…SAIT는 연구 인력 로봇 재배치
2020년 상용화 전망 실현은 아직…정부 2027년 계획은 어떻게?

전기자동차 시장 둔화세에 이어 자율주행 시장까지 속도조절에 나서면서 자동차 업계 미래 먹거리에 대한 걱정이 커지고 있다.
13일 업계에 따르면 현대자동차와 미국 자동차 기술 공급업체 앱티브(Aptiv)가 합작해 설립한 자율주행업체 ‘모셔널’은 최근 자율주행 개발과 상용화 일정을 연기하고, 인원 감축에 나선다.
또 삼성그룹의 삼성종합기술원(SAIT)은 연구과제에서 자율주행을 제외하고, 자율주행 소프트웨어 연구 개발 인력을 로봇 인텔리전스 연구로 전환 배치한다.
자율주행 업계의 구조조정이 최근 연이어 발발하고 있다. 2022년 폭스바겐과 포드가 투자한 아르고 AI가 폐업했으며, 2023년 3월에는 구글의 웨이모, 12월에는 GM의 크루즈가 구조조정에 나서는 등 완성차 업계들의 자율주행 회사들이 위기를 겪었다.
이는 완성차 업계가 자율주행 상용화에 대한 투자 속도 조절에 나선 것으로 여겨진다. 앞서 앱티브 또한 지난 2월 실적발표를 하며 "모셔널이 기술 로드맵 측면에서 계속 진전을 보이고 있지만, 더 이상 자본을 투입하지 않기로 결정했다"며 "모셔널에 대한 앱티브 지분도 점차 줄여나갈 것"이라 말했다.
올해 2월에는 애플이 애플카를 개발하는 '스페셜 프로젝트 그룹'을 해산하기로 결정했다는 소식도 전해졌다. 이 프로젝트는 자율주행차량 '애플카'를 개발하는 ‘프로젝트 타이탄’이다.
◆"2022년 레벨 4 개발" 전망이 2027년으로
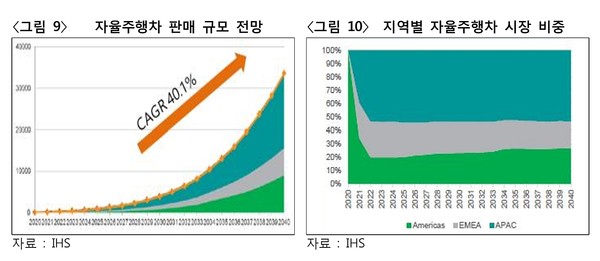
2017년 미국의 기술조사업체 내비건트 리서치(Navigant Research)는 "세계 3대 시장(북미, 유럽, 아시아) 자율주행 차량 연간 판매량은 2020년 8000대"로 "자율주행 레벨 3 차량의 구매가 가능"할 것이라 예상했었다.
3년 후 2020년 2월 KDB산업은행은 '자율주행차 국내외 개발 현황' 보고서에서 "구글, GM이 자율주행 관련 기술을 선도하는 가운데 글로벌 업체들은 2021년 전후 레벨 4 수준의 자율차 개발을 목표"로 하고 있다며 "현대차가 2019년 미국 앱티브와 5조원 규모의 합작회사를 설립하고 2022년까지 레벨4 이상 자율주행차 개발, 2024년 상용화를 계획"하고 있다고 말했다.
레벨 3 자율주행 차량이 시장에 등장한 건 예상보다 3년 늦은 지난해 혼다와 벤츠가 출시하면서부터다. 다만 두 차량은 고속도로에서 시속 60km로 구현이 제한돼 있다. 현대차는 속도를 80km 올린 레벨3 자율주행 차량을 준비 중이지만, 출시일은 아직 미지수다. 2016년 포드가 운전대(스티어링 휠)나 가속·브레이크 페달이 없는 완전한 자율주행 차량을 2021년 출시한다는 계획을 세웠다고 보도됐지만, 현재로서는 레벨 4도 포기하고 레벨 3에 집중하겠다고 밝힌 상태다.
우리나라 정부는 2027년이 자율주행 차량의 개화 시점으로 점찍어 겨로가가 주목된다. 정부는 지난해 12월 2027년 완전 자율주행 시대를 대비하겠다며 '완전 자율주행 시대에 대비한 도로교통안전 추진전략'을 발표하기도 했다.

◆"레벨 4, 5 자율주행 지금도 가능…하지만 누가 사겠는가"
업계 관계자는 "지금도 레벨 4, 5 수준의 자율주행도 조건만 갖춰지면 가능하다"며 "문제는 비용이다"고 말한다. 서울시는 합정역~동대문구간(9.8km) 구간에 레벨 4 수준 ‘심야’ 자율주행버스 운행 중이다. 우리는 일상적인 도로에서 다수의 운전자들 속에서도 운전대를 잡지 않을 수 있는 자율주행을 생각한다. 하지만 지금까지의 자율주행은 특정 조건 하에서만 실현되고 있다.
이는 결과적으로만 본다면 지난 50년 간의 자율주행 연구 성과에서 크게 벗어나지 않는다. 최초의 자율주행 차량은 1977년 일본 쓰쿠바 기계공학 연구소에서 개발했다. 해당 차량은 전면 2개 카메라로 도로의 흰색 표식 인식해 시속 30km의 속도로 달렸다.
10년 후 1987년부터 유럽에서 진행된 '유레카 프로메테우스' 프로젝트에서는 카메라와 센서 장착 메르세데스 벤이 시속 100km로 주행했다. 이후 1994년 메르세데스 벤츠의 500 SEL 모델은 최고 130km 속도로 달릴 수 있고, 차선 변경과 차량 추월까지 보여주며 발전된 자율주행 능력을 보여줬다. 이어 1995년 벤츠의 S클래스는 독일 뮌헨에서 덴마크 코펜하겐까지 총 1600km를 자율주행으로 운행했고 시속 175km까지 보여줬다.
더 나아가 2004년과 2005년, 2007년 미국에서는 인간의 개입이 없는 차량 주행 대회인 'DARPA' 챌린지가 열리기도 했다.
이 모든 실험들은 도로의 조건이 통제된 상황에서 이뤄졌다. 자율주행과 관련해 최초의 시가지 시험은 2010년 '구글카'며, 이는 그간 발전한 듯한 자율주행이 여전히 미숙함을 보여줬다. 업계에 따르면 구글카는 2014년 9월부터 2015년 11월까지 14개월간 시험한 결과, 341회의 '자율주행 기능 해제' 사례를 보여줬다. 272회는 ‘자율주행 기술의 실패’를 감지해 운전자로 통제를 전환했고, 나머지 69회는 사람이 먼저 위험감지해 통제권을 전환한 사례다.
업계 관계자는 "라이다나 레이더를 많이 달면 그만큼 자율주행 능력이 올라가고, 레벨 4나 5도 가능하다"며 "문제는 비용으로, 많은 라이다나 레이더를 장착해 수 억 원으로 가격이 올라간 자율주행 차량을 누가 사겠느냐"고 설명했다.

◆센서만 해결되면 되나? 자율주행 속도 '총체적'으로 봐야
자율주행 업계에서는 라이다를 사용할지 레이더를 사용할지 여전히 방향을 정하지 못한 상태다. 최근에는 라이다와 레이더는 혼용하는 방식이 더 주목 받고 있다.
라이다(Light Detection And Ranging)는 고출력 레이저 펄스를 발사해 목표물에 맞고 되돌아오는 시간을 측정하고, 이에 사물간 거리, 형태를 파악한다. 레이더는 레이저 대신 전파를 이용한다. 레이저 펄스는 전파와 비교해 빛의 직진성이 강하고 물체의 높이까지 파악이 가능해 전파보다 더 정확하지만 비용이 비싸다.
라이다나 레이더와 같은 센서 문제를 해결할 업체로 주목되는 곳이 루미나 테크놀로지다. 최근 라이다 가격이 저렴해졌다고 하지만 현재도 개당 1000달러가 넘어간다. ‘최소’ 4개의 센서가 필요한만큼, 차량 가격 중 라이다 가격만 600만원에 이르는 것이다. 루미나는 이를 루미나 500달러까지 낮출 계획임을 밝혔다. 오토파일럿을 통해 자율주행을 도입하고 있는 테슬라는 “라이다를 안쓰겠다”고 밝혔지만, 최근 루미나는 실적발표를 통해 최대 고객이 테슬라라고 발표하기도 했다.
다만 라이다와 레이더가 모든 문제를 해결할 것이냐고 묻는다면 그렇지 않다. 하드웨어와 함께 소프트웨어 문제가 대두된다. 볼보는 루미나 라이다를 장착한 것으로 알려진 대형 전기 SUV EX90 출시 일정을 지난해 말에서 올해 2분기로 연기하면서 “첨단 라이다 시스템의 소프트웨어 코드의 복잡성”을 이유로 들었다.
특히 전기차 시장의 캐즘 우려도 자율주행 차량 도입을 늦춰지게 한다. 라이다와 레이더를 통해 수집된 데이터는 차량에서 활용되지 못하면 쓸모가 없다. 이를 위해서는 고서능 컴퓨팅과 GPU 등 전력 소모량 높은 부품이 함께 차량에 탑재돼야 하고, 고배터리 장착한 전기차가 아니고서는 자율주행은 어렵다는 이야기다. 자율주행 개발에 있어 센서의 한계를 벗어나자자는 ‘자율주행협력차’도 마찬가지다. 자율주행협력차는 도로 주변 인프라나 교통센터 정보를 자율주행에 활용하자는 개념이다.
또한 통신 기술도 함께 보강이 필요하다. V2X는 지능형 교통 시스템에서 차량과 다른 참여자(이동식 또는 정지식) 간의 외부통신을 지칭한다. 이는 차량 대 차량(V2V), 차량 대 인프라(V2I), 차량 대 네트워크(V2N), 차량 대 보행자(V2P) 등 4가지로 구분된다. 이와 함께 C-ITS‘차세대 지능형 교통 시스템’ 개념도 있다. 주변 교통 상황과 급정거, 낙하물 등 위험 상황 정보를 실시간으로 제공해 도로 관리 중심이 아닌 이용자 안전 중심의 교통 시스템이다. 한국자동차연구원은 지난해 V2X 통신방식과 C-ITS 자율주행을 포함한 서비스 레벨화가 정해지지 않았다는 지적을 한 바 있다.
SK증권은 "금방 열릴 것 같던 레벨 3 자율주행조차도 완성차와 정부와의 의견 차이, 기술적 문제점 등에 따라 생각보다 지연되고 있는 상황이다"며 "Level 0~2 까지 사고 책임은 운전자에게 있지만, 진정한 의미의 자율주행수준인 Level 3 부터는 자동차 회사도 사고책임을 일정부분 부담해야 되기 때문에 합의가 쉽지 않다"고 말했다.
이어 "자율주행 시장이 확대되기 위해서는 ▲자율주행을 위해 필요한 전기차 확대 ▲주행 기술 고도화 ▲사회적 용인이 가능한 낮은 사고율 ▲저전력의 고성능 프로세서 ▲고용량 배터리 ▲HD급 지도 등이 필요하다"고 덧붙였다.